Postado por: Equipe Maker
Sobre o Projeto
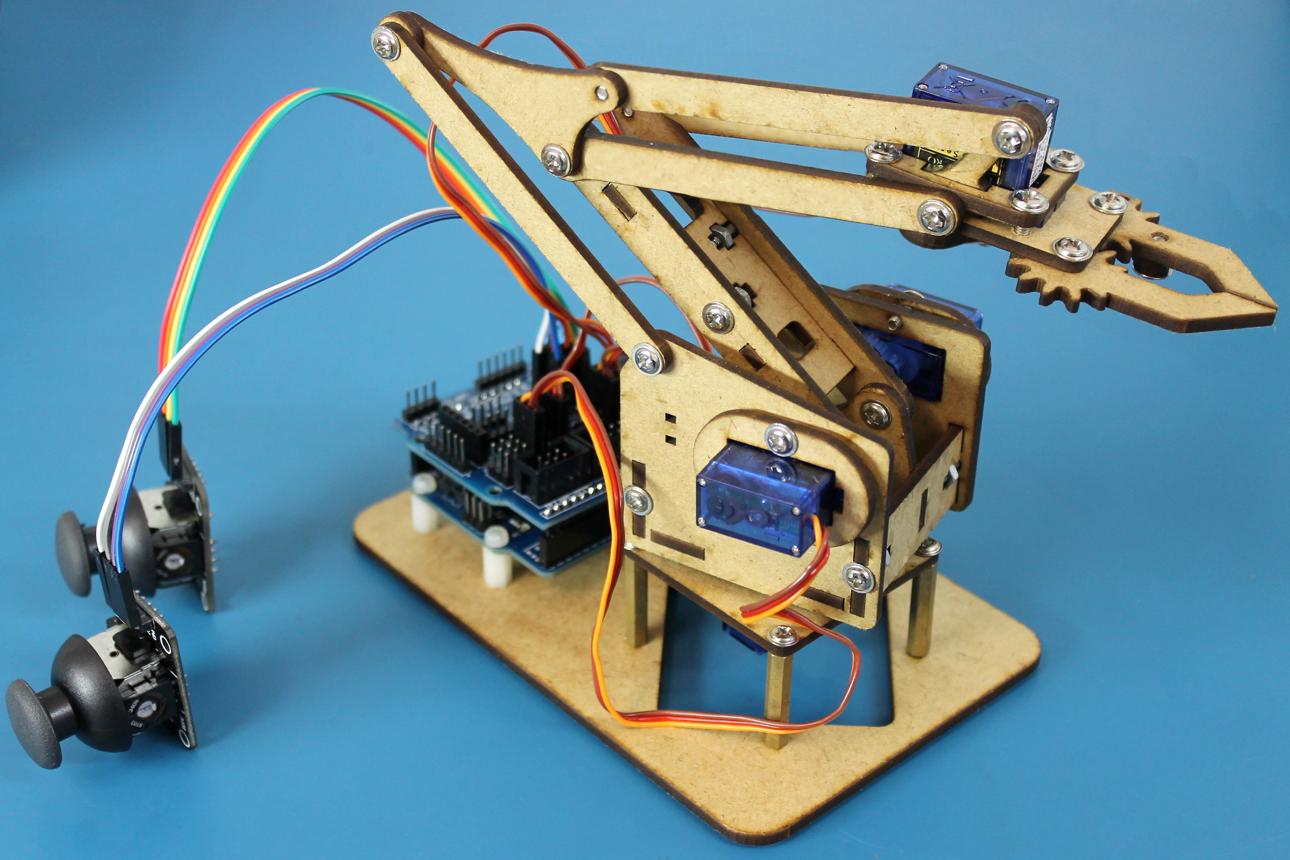
Monte um braço robótico que pode ser controlado em tempo real usando um joystick. Muito usado em introdução à robótica industrial.
Materiais Necessários
- 1 Arduino Uno
- 3 a 5 servo motores SG90 ou MG996R
- 1 módulo joystick KY-023
- Fonte de alimentação externa 5V a 6V
- Jumpers fios
- Estrutura do braço em 3D, MDF ou papelão reforçado
Passo a Passo
- Monte a base do braço
- Fixe os servos nas articulações base, braço e garra
- Certifique-se de que os movimentos estão livres
- Conecte os servos ao Arduino nos pinos PWM
- Ligue o eixo X do joystick no A0 e o eixo Y no A1
- Use fonte externa para alimentar os servos
- Conecte o GND de tudo em comum
- Carregue o código e teste os movimentos